The art of measurement
Know your equipment to get the most out of it
Sensors for measuring air quality
For personal use, there are several types of sensor available on the Internet.
In the case of citizen sensors, these have been developed by the University of Stuttgart (Germany) using off-the-shelf components, so that anyone can build their own sensor: see the website https://sensor.community/fr/sensors/airrohr/
Official stations, such as Atmo France, use much more sophisticated and expensive sensors. Examples of sensors used: https://www.atmo-france.org/article/les-appareils-de-mesure
The citizen sensor
It is based on an SDS011 particle detector, an optical detector, and also incorporates a BME280 temperature and humidity detector; however, the temperature and humidity detector is not always operational in all measurement sensors. The whole unit is mounted in a closed box that also has an air inlet and outlet. The particle detector is limited to PM2.5 and PM10 type particles and provides an optical particle count. This outdoor unit should be protected from rain as far as possible.
However, the architecture of this sensor is rudimentary and does not allow for appropriate adjustment of the sensor, hence the need for characterisation (presented below).


The official Atmo France sensor
The sensors referenced and analysed in the articles on this site are fixed and positioned in neighbourhoods or along busy roads (e.g. photo opposite on the Toulouse ring road). They can measure a range of pollutants, in particular deposition particles such as PM2.5 and PM10; in the latter case, the measurements provide direct mass data every hour. Atmo readings are supplemented by measurements from mobile sensors, enabling modelling to be carried out over large geographical areas in urban environments.

In addition to measuring PM10 and PM2.5 particles, Atmo Occitanie’s sensors can (depending on their allocation) collect data on NO, NO2 and Ozone levels. This information is very interesting when it can be cross-referenced with particulate emissions, particularly from road traffic.
Calibration of citizens' sensors
Citizen sensors are built from low-cost off-the-shelf components, and their behaviour varies from one to another because of the disparity in the performance of the assembled components. However, the dynamic performance of these sensors is excellent and consistent from one sensor to another, with a signature close to that of professional sensors. This makes them a real asset, provided that the gain can be adjusted individually between each sensor to faithfully reflect the concentrations measured in the same environment.
What are we trying to measure?
The aim is to obtain measurements of PM particles with sufficient accuracy to enable comparisons to be made between sensors, so that conclusions can be drawn about the quality of the environment observed. To achieve this, the target measurement range is between 0 micrograms per m3 and 50 micrograms per m3 for PM2.5 and up to 70-80 micrograms per m3 for PM10. Beyond these limits, there is no point in seeking precision, as we are already beyond the acceptable limit.
Calibration between sensors
This involves comparing the response of sensors placed in the same environment and under the same conditions (orientation, exposure, temperature, wifi network, etc.). Experience of comparing sensors shows that measurement differences can reach 200% for the worst sensors; in general, the correction varies from 1 to 1.5 in most cases.
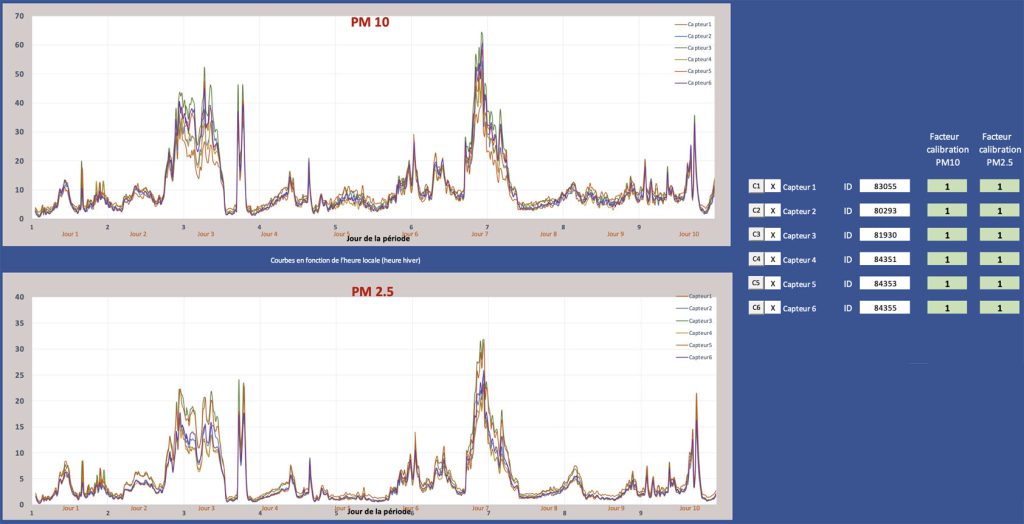
Series of sensors without calibration
In this case, the raw data from six sensors placed at the same location during the same period are displayed on the same graph.
Although the differences are small at low levels, they are nevertheless significant at certain periods in terms of their absolute value, and the differences are more noticeable at higher concentrations.
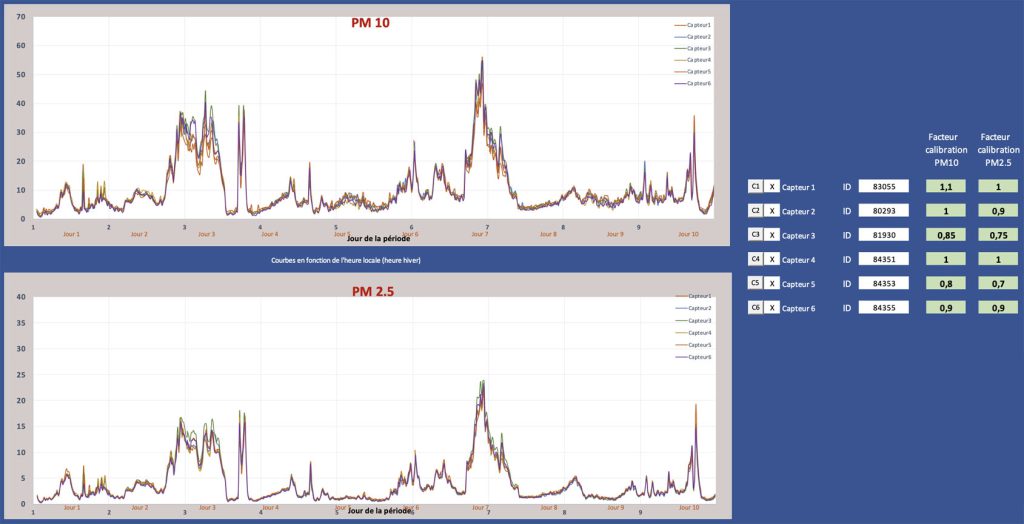
Series of sensors after calibration
By adjusting the gains of the sensors in pairs, we reduce the dispersion of their measurements at low levels and also during peak measurements. Calibration is more effective for PM2.5 than for PM10.
Here we can see potential gain differences of 30% between sensors, which translates into lower levels, particularly during high emissions.
Larger differences in gain are sometimes observed between sensors, which is why it is worth carrying out this operation to make measurements and comparisons between sensors more viable.
Complementarity citizen sensor - official sensor
Are citizen sensor measurements sufficiently reliable to supplement official sensor data?
A preliminary answer to this question is to compare the behaviour of a citizen sensor with that of an official sensor in a similar environment.
Sensors in the centre of Toulouse
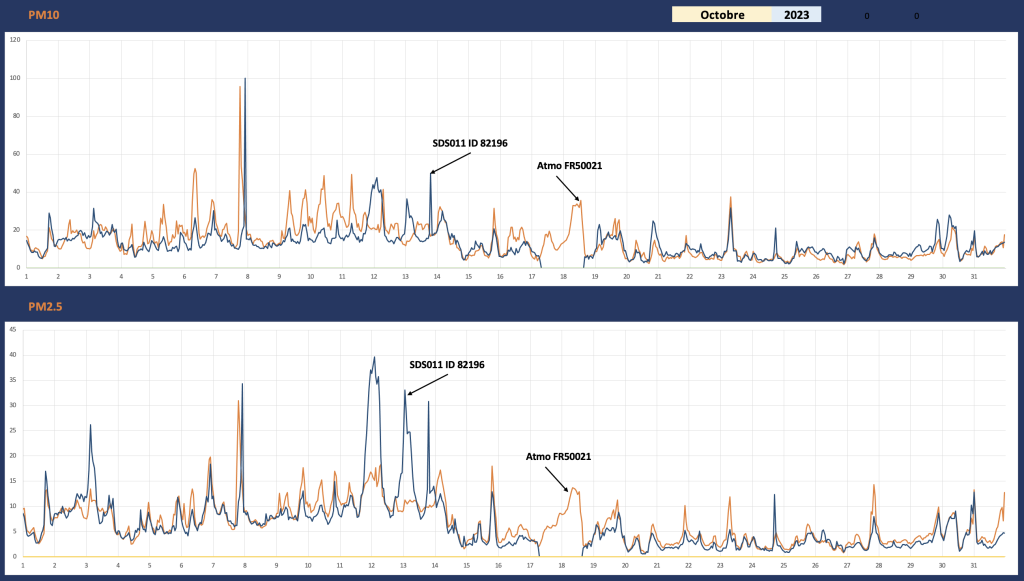
The comparison of the official sensor (FR50021) and the citizen sensor (ID82196), located very close to each other in Toulouse, during a period without any major climatic disturbance (October 2023) shows similar behaviour over a large part of the period; the reproducibility of the measurements appears to be stronger for PM2.5 than for PM10.
Variations in measurements are noticeable from the 10th to the 13th of the month and reflect more a particular event in the environment of sensor ID82196 than a difference in the behaviour of this sensor compared with the Atmo sensor.
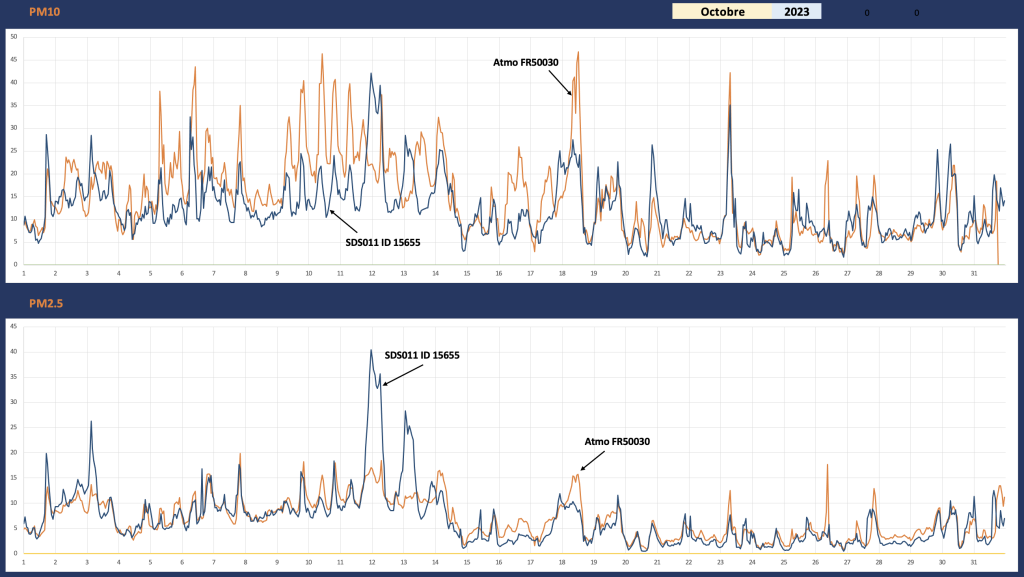
Two other sensors located in the centre of Toulouse but in a different location, an official sensor (FR50030) and a citizen sensor (ID15655), but further apart (a few hundred metres) show a fairly good correlation between their measurements and in particular a very close signature for PM2.5 compared with PM10.
Once again, particularities are noted over the period from the 11th to the 13th of the month for the Citizen sensor, which is closer to the previous ID 82196 sensor than the new Atmo sensor.
We also note higher PM10 emissions on the Atmo sensor than on the citizen sensor. This trend of higher PM10 emissions can also be seen in the measurements of another citizen sensor located further south, opposite sensor 15655, compared with sensor FR50030.
These observations between citizen sensors and official sensors show that they can be used as a complement to carry out global environmental analyses. This particularity therefore offers an opportunity to characterise air quality in places where official sensors are not present and where citizen sensors are deployed through individual or collective actions; this is the case in the west and south-east regions (Castanet Tolosan) of Toulouse.
Effects of humidity and temperature on the citizen sensor
During cold, wet spells, particularly in foggy weather (winter), the measurements of citizen sensors can drift. A few simple experiments have led to the following observations and possible corrections.
Influence of humidity rate
There does not appear to be any appreciable influence or direct relationship between humidity levels and measurements of particle concentrations by the citizen sensor. For example, in the readings presented between 5 and 8 January 2024 (see analysis tab), where high levels of humidity were recorded, no significant variation in PM10 and PM2.5 concentrations can be matched.
However, it is often reported in Sensor Community discussions that increases in PM measurements are linked to increases in measured humidity levels (especially above 70%), to the extent that some people recommend humidity correction models.
As a reminder, the humidity level is the ratio between the water vapour pressure in the air and the saturation vapour pressure in the climatic conditions concerned. Saturation vapour pressure increases with decreasing temperature according to Rankine’s law (ln(Psat)=13.7-5120/T (in K)). So when the temperature drops, the humidity level increases at a constant water content, and vice versa. However, because of its low-cost electronics, the performance of the citizen sensor varies in particular with low temperatures; therefore the variations in PM measurements are more related to the decreasing environmental temperature than to the increasing humidity level itself. The impact of low temperatures on PM concentration measurements is discussed below.
The fog effect
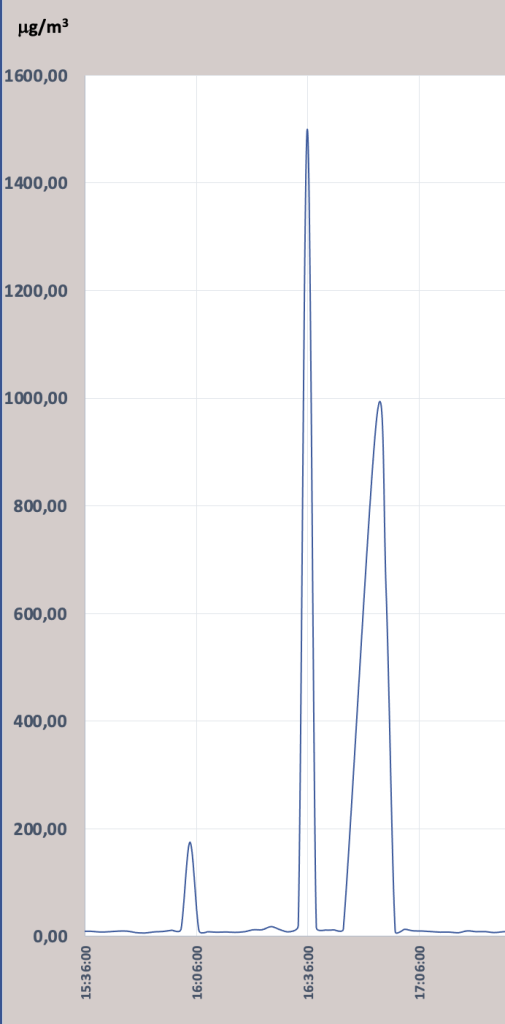
When the humidity level is close to 100%, the presence of water vapour in the atmosphere is transformed into micro-droplets of fog. As the SDS011 is based on optical particle measurement, any droplet entering the sensor can be considered a sedimentary particle. As a result, during periods of fog of varying intensity, the concentrations measured by the citizen sensor increase drastically.
When a volume of water at boiling temperature is brought close to a sensor, the concentration measurement quickly rises to values that have nothing to do with natural pollution.
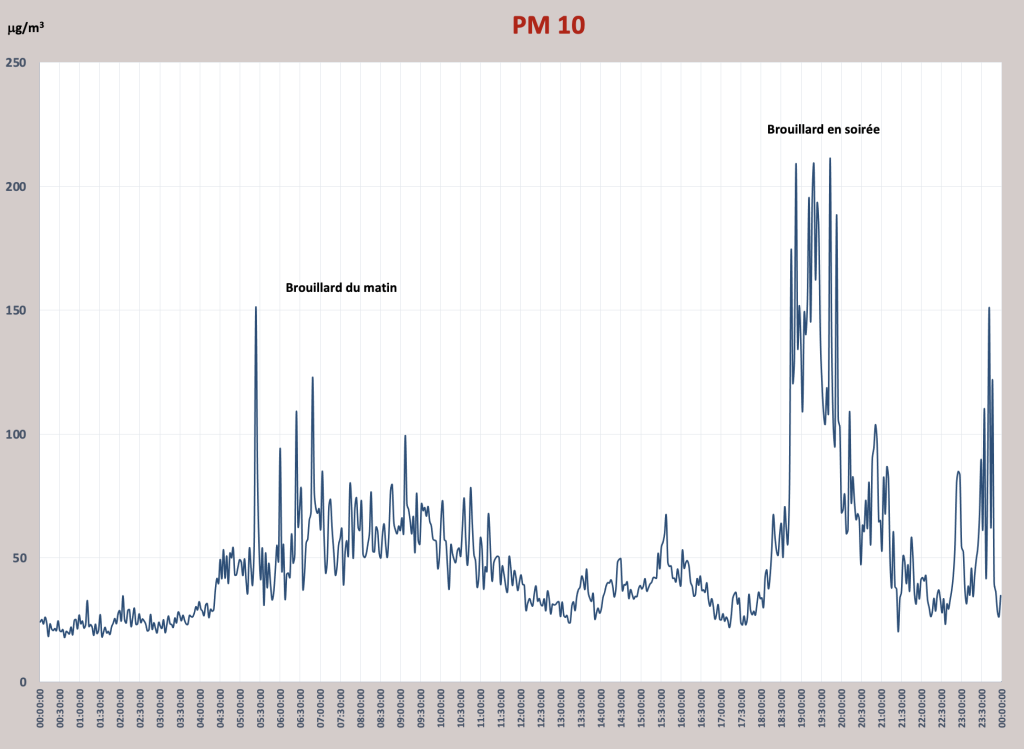
The presence of fog greatly disrupts concentration measurements at unusual values (e.g. 15 January 2024 at the Mons sensor on the outskirts of Toulouse). Such periods are easily identifiable but cannot be easily corrected. In order not to disrupt the overall analyses with such measurements, the method implemented consists of clipping these measurements to low values (e.g. 50).
In order to mitigate the effects of humidity on sensor measurements, some advanced sensors are equipped with air inlet heaters to dry the samples being measured. This implementation becomes complicated for citizens’ sensors that greatly modify the design of the sensor, if only by installing a power supply adapted to a “heating” function.
As far as official Atmo sensors are concerned, we have no information on how this type of disturbance is managed.
Influence of low temperatures on citizen sensor measurements
This is probably the most influential factor that needs to be analysed and corrected for the use of citizen sensors.
Unfortunately, the citizens’ group does not have a laboratory where this specificity can be better characterised; the best approach would be to carry out experiments in a climate chamber with a controlled particle environment (i.e. stable in the field concerned).
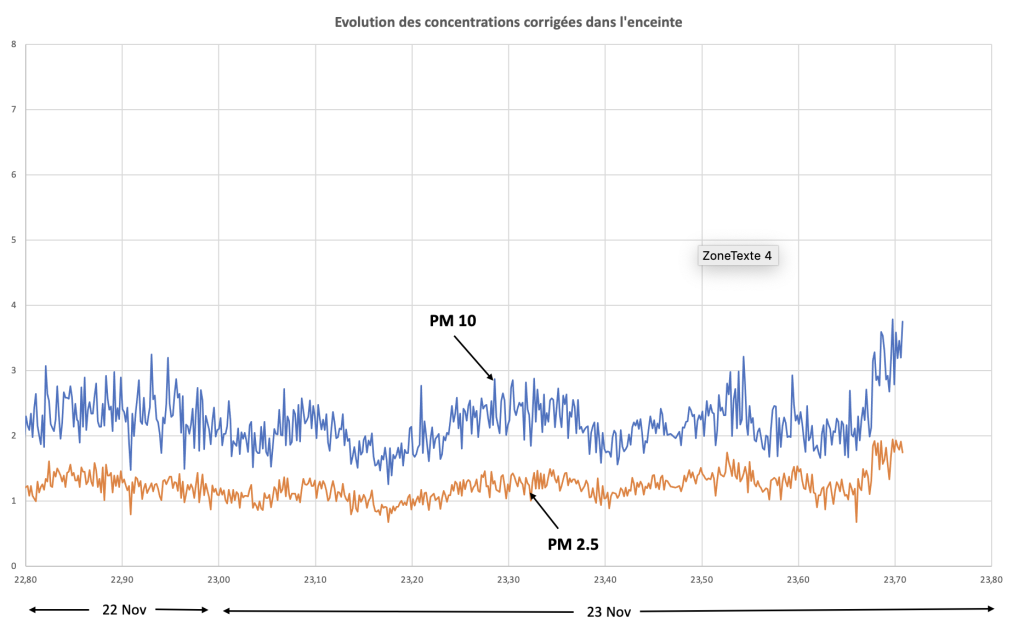
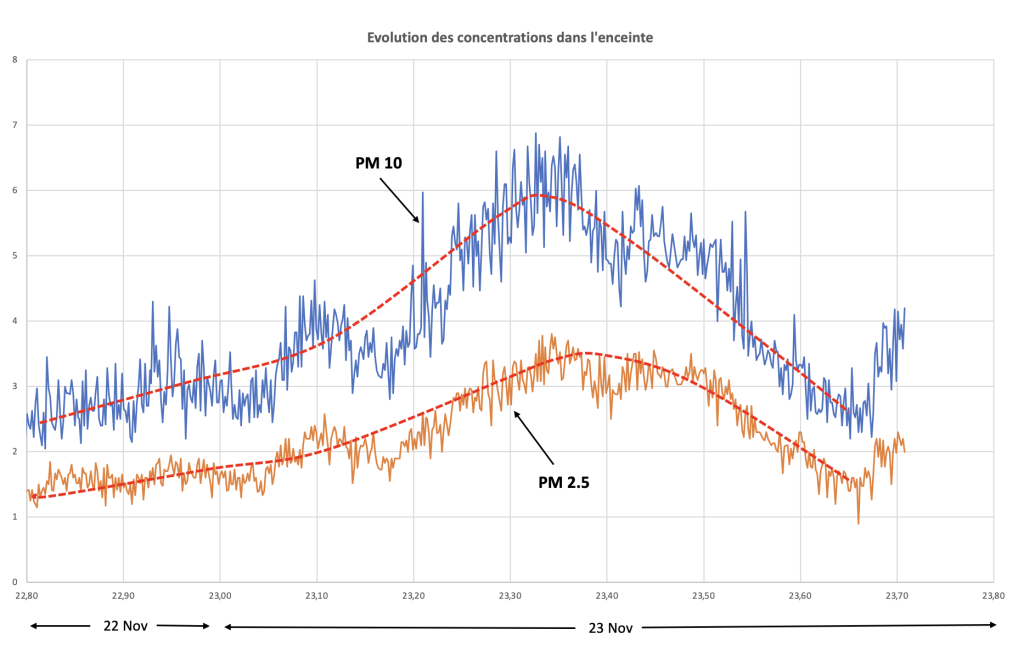
An ‘amateur’ experiment was carried out, consisting of isolating a sensor in a quasi-tight enclosure that minimises external disturbances in order to maintain an environment of constant concentration, and carrying out measurements on a winter’s night in order to take advantage of natural thermal changes (simple and inexpensive!). Despite the simplicity of the experiment, some interesting observations were made that led to some useful recommendations.
Concentration - temperature relationship
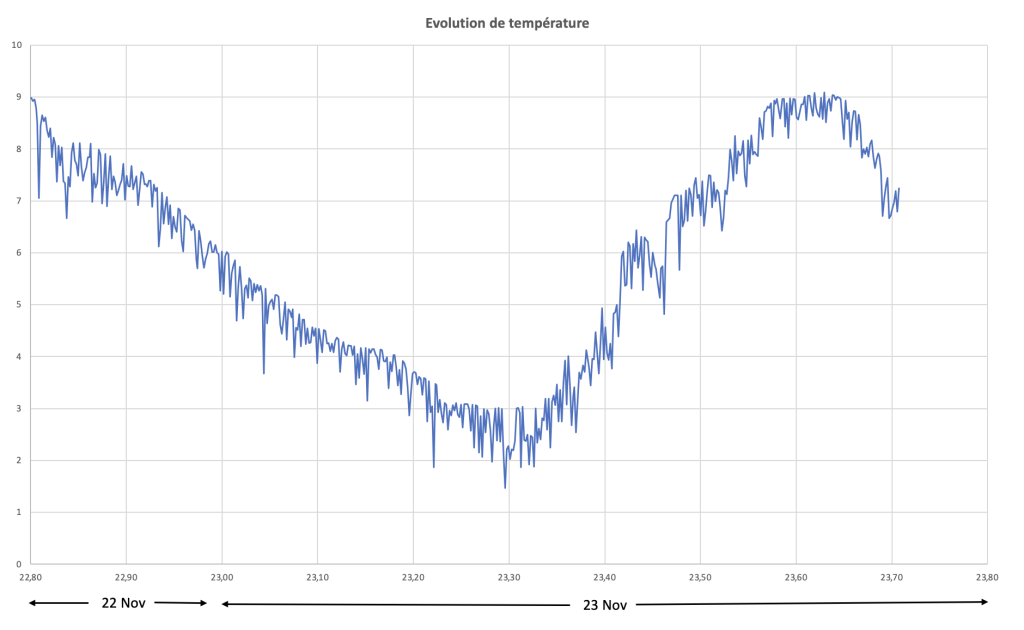
There is a clear link between changes in measured concentrations and changes in temperature during the period under consideration (night of 22 to 23 November 2023). Concentration values are found when maximum temperatures occur (during the experiment). However, there is a time lag between the optimum concentration and the minimum temperature (approximately 1 hour); this is due to the thermal inertia of the sensor, as the electronic components do not follow the same dynamic due to their own heat dissipation.
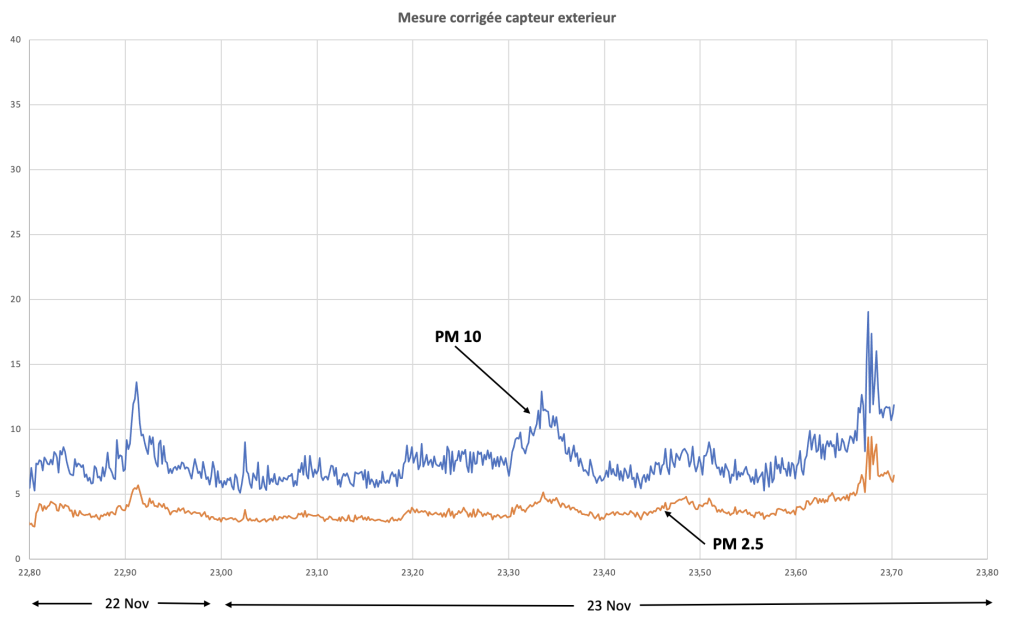
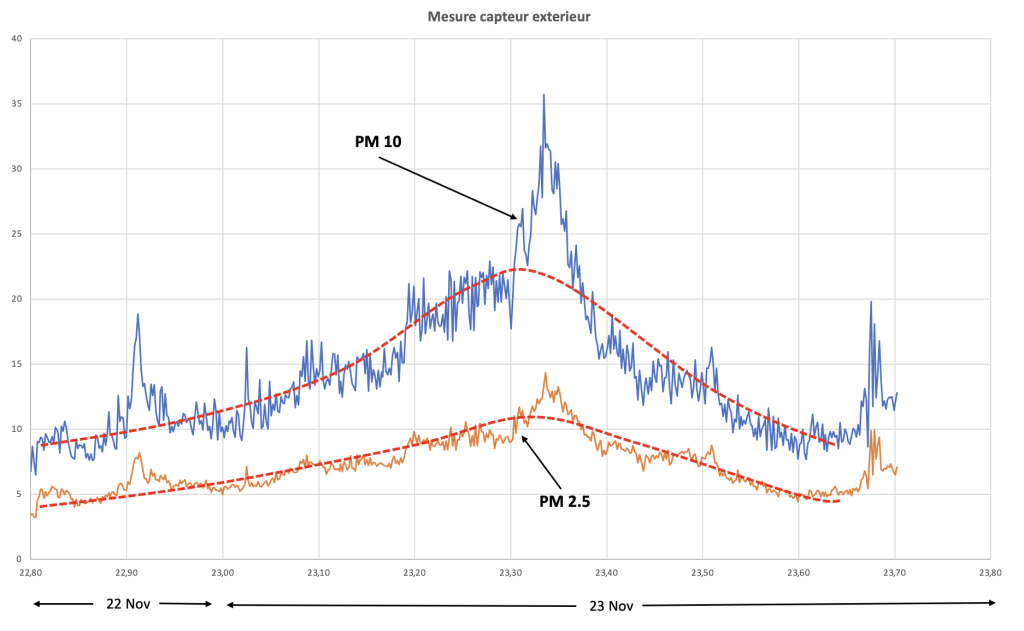
An outdoor sensor shows a similar trend (left curve). Peak’ values, signs of changes in the outdoor environment, appear in addition. The measurement ratios over the course of the experiment are equivalent between the two sensors (indoor and outdoor), showing that the trend obeys the same parameter, which is the ambient temperature.
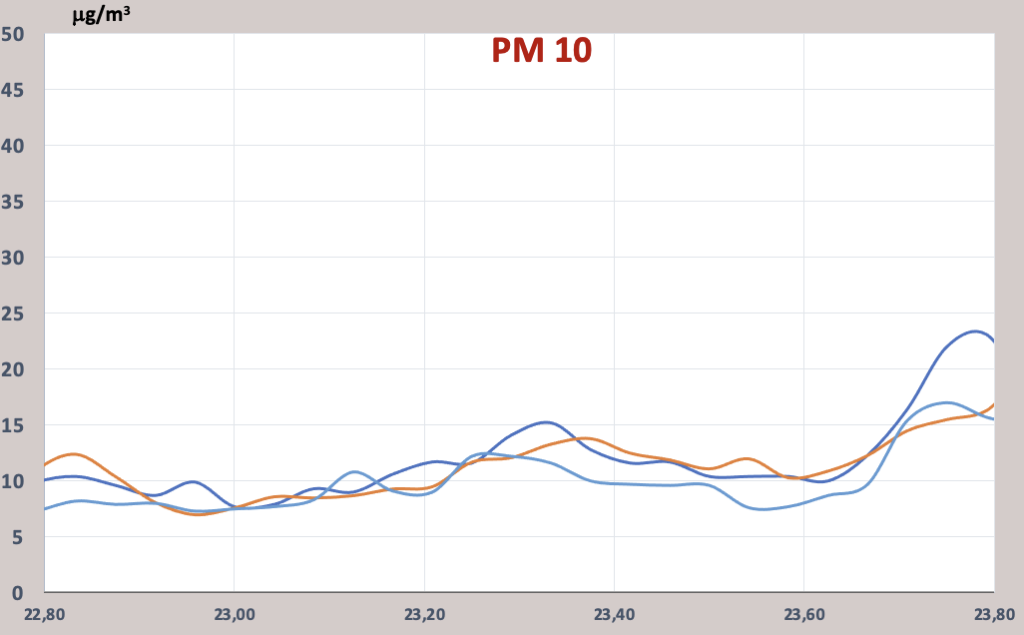
An examination of certain official Atmo sensors in Toulouse (right-hand curve) over the same period does not show this trend and presents a relatively constant PM10 concentration.
Correction of temperature effect
A correction coefficient on the PM values in the form 1/(1+((T0-T)alpha)/K) is applied to correct the disturbing effect of temperatures below the reference temperature T0 (here 10°C in relation to the experiment conducted). The parameters K and alpha are defined for the two types of PM concentration; for the sensors present, K=10 for PM10, K=8 for PM2.5 and alpha= 1.4 for PM10 and 1.3 for PM2.5. The temperature T considered is shifted by one hour with respect to the measured temperature in order to take into account the thermal inertia effect of the sensor electronics.
For both sensors (inside the enclosure (left) and outside (right)), changes are independent of temperature and similar to those recorded by official sensors. This correction is applied in the monthly analyses presented in the corresponding tabs.